Research Infrastructure

CITEC Building
Our research building is conceptualized to best serve the needs of researchers. Special feeder labs surround Central Labs, which support CITEC researchers in combining their complex research results. Meeting rooms and conference areas put people in conversation with each other. These facilities make the CITEC building unique and bring together 250 researchers under one roof.
The CITEC building was constructed with state and national funds from the research building funding.
Numbers






{kind=link}
Research Platforms
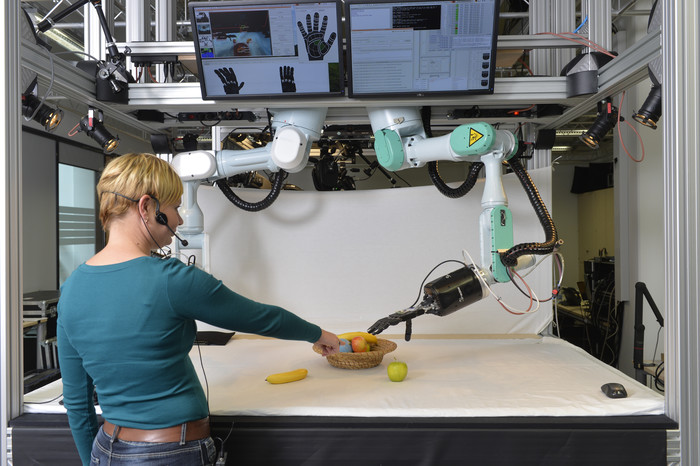
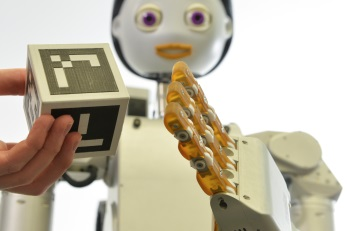
© Universität Bielefeld Bi-manual manipulation robot
An advanced bi-manual manipulation robot with anthropomorphic hands uses joint experimentation involving the robotics, psychology, and biology groups. For instance, this enables researchers to compare robot and human multi-digit force adaptation strategies during grasp stabilisation.
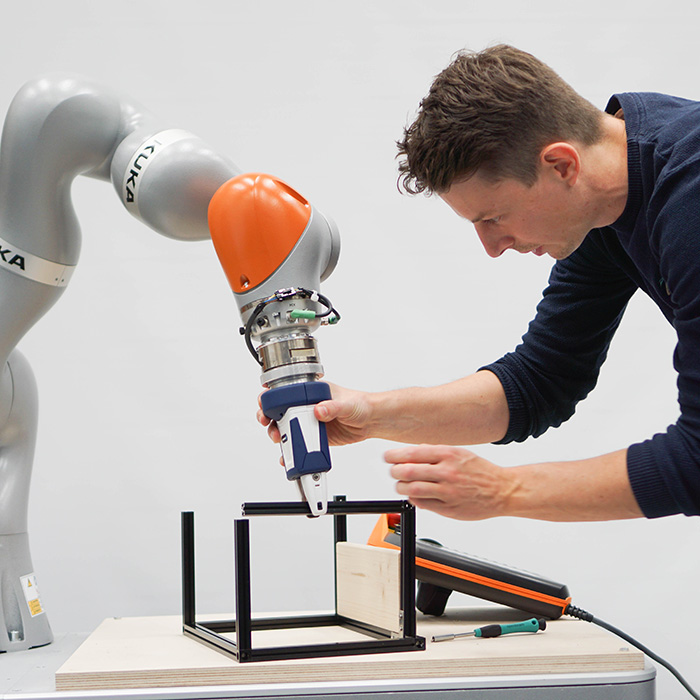
© Universität Bielefeld, CoR-Lab Human-Robot Collaboration
Collaborative robots are used to explore flexible assembly scenarios. Research aims at the efficient programming of such kind of robots, their integration in modular production processes, and the interactive learning of automated assembly tasks.
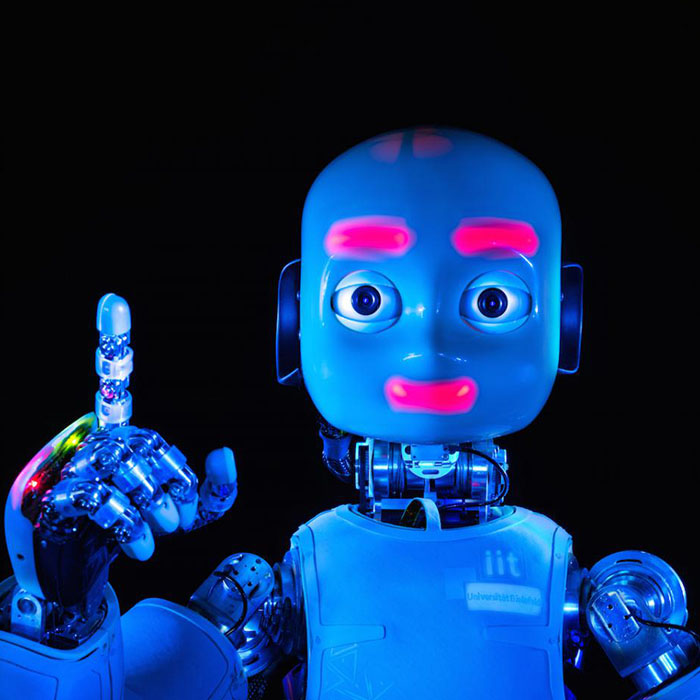
© Universität Bielefeld, CoR-Lab Humanoid robots (iCub)
Humanoid robots like iCub are used to explore strategies of attention and behavior acquisition. Research on parent-child interaction inspires teaching and learning strategies in human-robot interaction.

© Universität Bielefeld, CITEC Virtual assistant Billie
The virtual assistant Billie is meant to be a new kind of helper for people with cognitive difficulties who require support. It has already been used at people's homes to study its usage in real world settings.
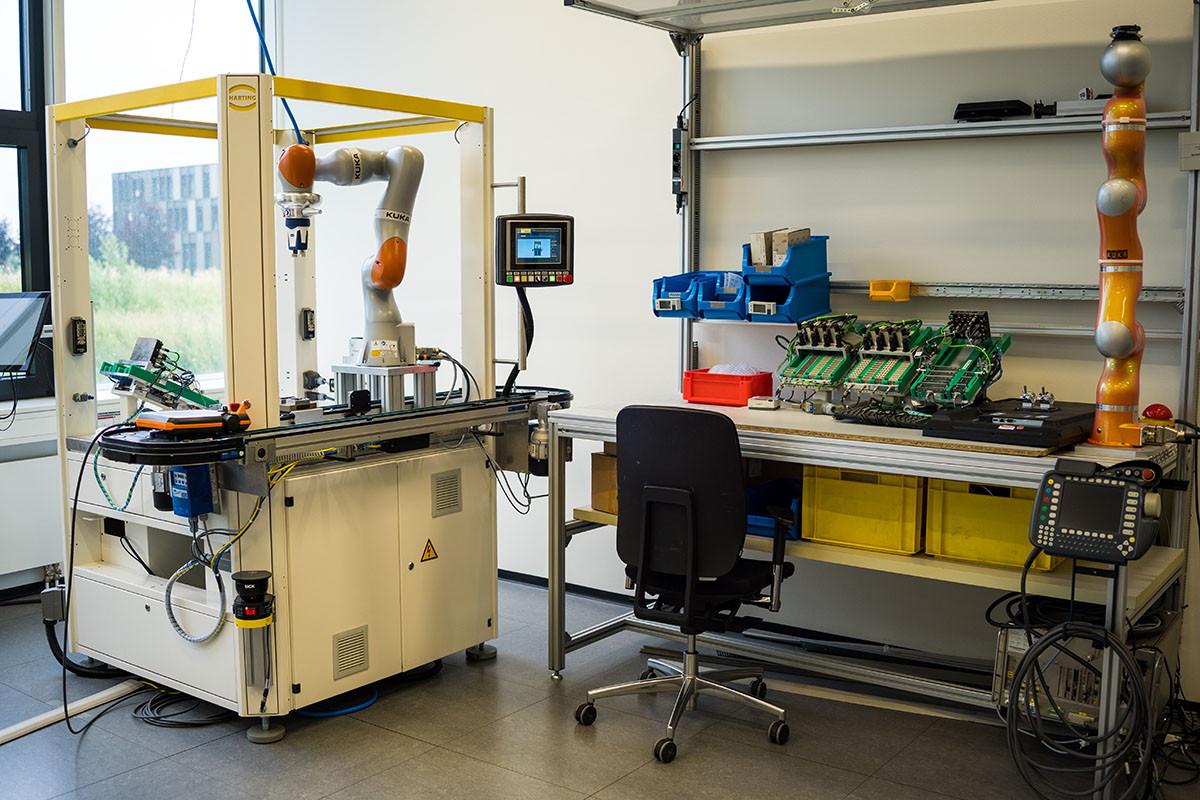
© Universität Bielefeld, CoR-Lab Industrial work cells
Flexible work cells are explored in term of worker assistance as well as in terms of an iterative planning of its layout. Such flexible collaborative working environments are relevant for highly specialized small and medium-sized companies.

TIAGo Robot (PAL Robotics)
The TIAGo Robot from PAL Robotics entails a mobile platform with differential drive and an upper part with lift and 7-DoF-arm with F/T sensor and Schunk parallel gripper.

MekaBot M1
Omnidirectional robotic platform with an anthropomorphic bimanual torso with sensor head which is mounted on a lift. This platform was used in the research apartment within the Cognitive Service Robotics Apartment (CSRA) project.

CAVE Automatic Virtual Environment
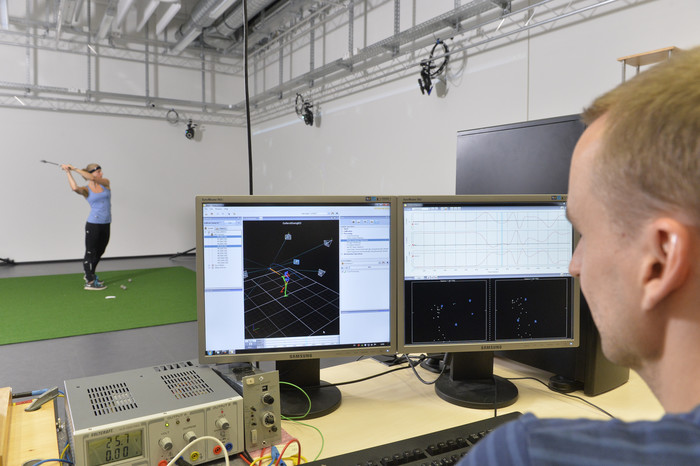
This is an L-shaped 3D stereo back-projection (passive infitec). The CAVE is exemplarily used in the ICSPACE project where it features an assistive sports scenario.

Virtual and Extended Reality Lab
The virtual reality lab provides a projection-based CAVE, motion tracking systems, and head-mounted devices to realize mobile augmented reality systems.

© Universität Bielefeld, CITEC Six-legged robot Hector
Hector is a six-legged robot and its construction was inspired by the stick insect. It has passive elastic joints and an ultra-light exoskeleton. Research aims at a deeper understanding of motion intelligence and attentive systems.

Research Apartment
The Cognitive Service Robotics Apartment provides a full-blown home environment equipped with multiple distributed sensor/actor-devices and robotic components. It also utilizes ambient technology like projectors, ambient light, sound, tactile floors and table surface, etc.
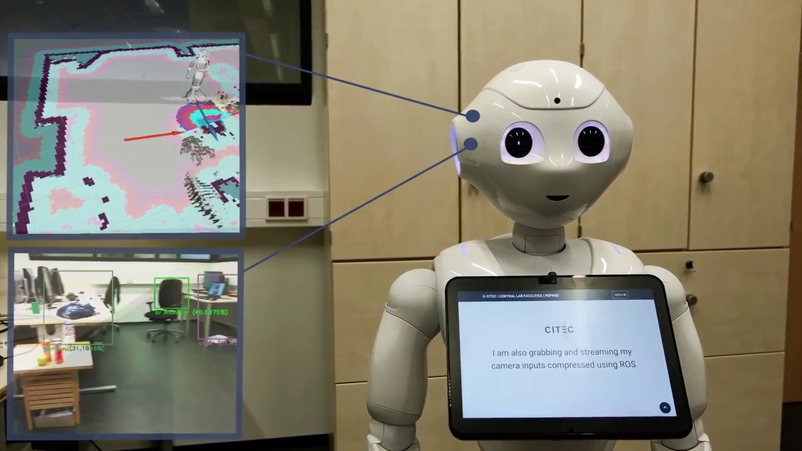
Pepper
Pepper is a humanoid robot from Softbank Robotics / Aldebaran Robotics. The robot was used in the RoboCup@Home competitions in 2017 and 2018.
Floka
Floka is an anthropomorphic robot head. The modular design of this sensor head is inspired by the Flobi robot head. It can form facial expressions (mouth/lips, eyes, eye brows, eye lids, neck). It is used in different setting with the Meka M1 platform or as a Cobot in the FAMULA project.

Flobi
This is an anthropomorphic robot head that combines a modular design approach with a sensor head. It comprises 18 degrees of freedom for facial expressions (mouth/lips, eyes, eye brows, eye lids, neck).
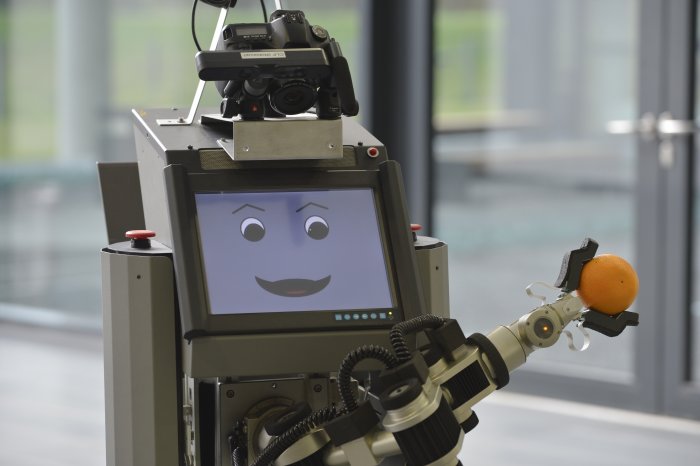
Tobi/Biron
This platform is based on the MobileRobots GuiaBot and was used in the RoboCup@Home competitions (2009-2016).