Neurocognition and Action - Biomechnics
© Universität Bielefeld

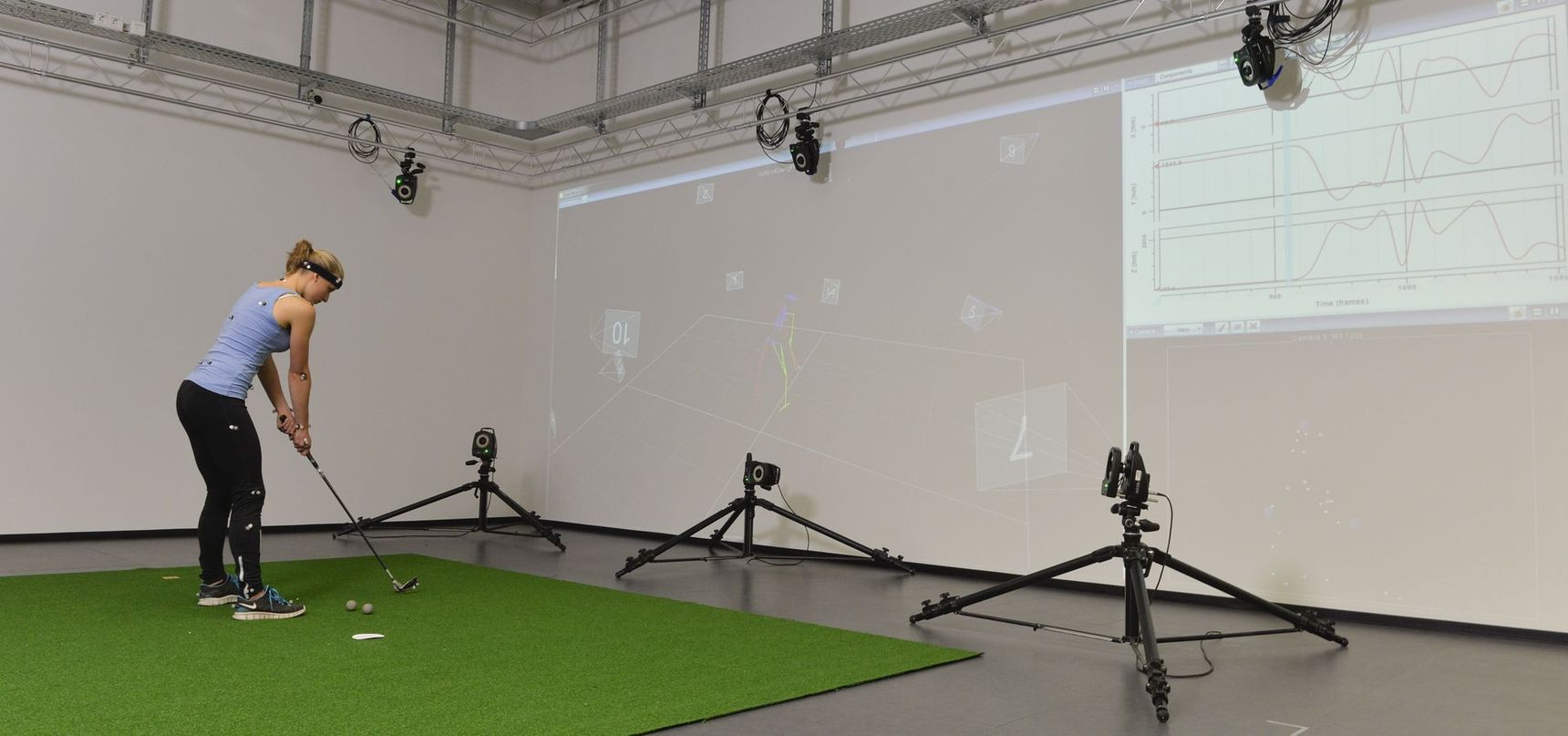
Biomechanics Lab

In the Biomechanics Lab the kinematics and dynamics of complex human motion are investigated. Additionally, the lab provides means to conduct experiments in a virtual reality environment. This research-site uses state-of-the-art equipment to measure 3d motion in real-time and to provide online feedback of kinematic and dynamic parameters of human action.
Research Topics

- Motor hysteresis as a proxy for motor planning
In sequential reaching tasks, the grasp postures we select depend on our movement history (Rosenbaum & Jorgensen 1992). For example, when we open a column of slotted drawers in descending order, we use an overhand grasp for the highest drawer and persist on this grasp type for most of the subsequent drawers. In ascending sequences, we persist on our initially selected underhand grasp (Weigelt et al. 2009). This tendency to switch the movement state at different positions, depending on our movement history, is termed motor hysteresis (Kelso et al. 1994).
Experimental evidence suggests that motor hysteresis represents a cognitive aspect of motor planning (van der Wel et al. 2007). All motor planning results in a cognitive cost (Rosenbaum et al. 2007). In a sequential task, this cost is reduced by the reuse of a former motor plan. If posture selection is continuous (e.g., round drawer handles), each motor plan is created by a modification of the former plan, with a varying fraction of reuse (Schütz & Schack 2013a). A larger fraction of reuse reduces the cognitive cost, but increases the mechanical cost of the movement. Vice versa, an increase in mechanical cost reduces the fraction of reuse (Schütz & Schack 2013a).
The size of the motor hysteresis effect therefore not only serves as a proxy for the fraction of novel planning and plan reuse (larger fraction of novel planning = smaller hysteresis effect), it can also be used to estimate the cognitive and mechanical costs of a motor task. In the biomechanics lab, we use motor hysteresis as a tool to investigate the effect of different experimental perturbations on motor planning.
- Motor primitives in reaching movements
Many of the seemingly simple tasks we conduct in our daily lives, such as reaching for an object, require a series of sensorimotor transformations which map the object's position on our retina to an appropriate muscle activation pattern. A number of these transformations have infinitely many valid solutions: Each target position can be reached by various trajectories and all positions on a trajectory can be achieved by different postures. The selection of a single solution thus results in an ill-posed problem for the motor system (Jordan & Wolpert 1999).
One way to reduce redundancy on a postural level is to combine multiple independent joint angles into a motor primitive (Bernstein 1967). Joint angles in a motor primitive are no longer controlled individually but instead are coupled in their action. Previous studies on motor primitives for reaching movements were restricted to sagittal (Berret et al. 2009, Latash et al. 1995) or horizontal (Debicki & Gribble 2005, Sabatini 2002) target planes. However, it is unlikely that we have acquired specialized synergies for each arbitrary target plane. Instead, generalized synergies should exist to reach target locations within the three-dimensional workspace of the arm.
In the biomechanics lab, we investigate motor primitives of reaching movements in an augmented reality environment, with target locations distributed uniformly in the three-dimensional workspace of the arm (Schütz & Schack, 2013b). We also measure motor primitives in sequential reaching tasks (opening a column of drawers) and the motor hysteresis effect associated with each motor primitive. That way, we can test whether joint angles (1) have to be strictly controlled to satisfy the constraints of the task, or (2) can be controlled more loosely, to save cognitive cost (Schütz et al. 2016b).
- Mutual interference of motor and working memory tasks
Due to its cognitive demands, motor planning disrupts working memory in the same manner as other intervening cognitive tasks (Lawrence et al. 2001). This holds true even for the simplest reaching tasks (Logan & Fischman 2011). In a sequential reaching task, the disruptive effect was first demonstrated in our labs (Weigelt et al. 2009). Participants had to open a column of slotted drawers in a sequential order, retrieve a cup from each drawer, and memorize the letter inscribed on the bottom of the cup. Analysis of the verbal memory performance showed that the recency effect was eliminated by the concurrent motor task, which indicates a disruption of short term memory (Glanzer & Cunitz 1966).
As verbal and motor tasks share limited working memory resources (Cowan 2001), this disruptive effect should be mutual: Execution of a concurrent memory task should reduce the available cognitive resources for motor planning. This effect has not yet been conclusively demonstrated. In the biomechanics lab, we investigate the interference of verbal and spatial memory tasks with motor planning. The size of the motor hysteresis effect is used as a proxy for the fractions of motor planning and motor plan reuse (Schütz & Schack 2013a). A depletion of cognitive resources should result in a smaller fraction of novel planning and, consequently, a larger hysteresis effect.
Lab Panorama
Lab Equipment
- 12 Vicon MX-F20 cameras (480 fps, 2.04 megapixel)
- 2 Vicon MX Ultranets with A/D converter (64 channels, max. 192 000 sps, 16 bit resolution)
- 3 AMTI force plates (strain gage technology, 3d forces and torques, max. 8 896 N, Vicon connectable)
- 2 Basler Pilot DV cameras (210 fps, 0.31 megapixel, GigE, Vicon connectable)
- 2 Basler A602fc DV cameras (100 fps, 0.30 megapixel, Firewire, Vicon connectable)
- 2 Canon XEED SX7 wide angle projectors (4 000 lumen, 60 fps, 1.47 megapixel)
- Myon wireless EMG system (16 channels, 4 000 sps, 12 bit resolution, Vicon connectable)